The use of this site and the content contained therein is governed by the Terms of Use. When you use this site you acknowledge that you have read the Terms of Use and that you accept and will be bound by the terms hereof and such terms as may be modified from time to time.
All text, graphics, audio, design and other works on the site are the copyrighted works of nasscom unless otherwise indicated. All rights reserved.
Content on the site is for personal use only and may be downloaded provided the material is kept intact and there is no violation of the copyrights, trademarks, and other proprietary rights. Any alteration of the material or use of the material contained in the site for any other purpose is a violation of the copyright of nasscom and / or its affiliates or associates or of its third-party information providers. This material cannot be copied, reproduced, republished, uploaded, posted, transmitted or distributed in any way for non-personal use without obtaining the prior permission from nasscom.
The nasscom Members login is for the reference of only registered nasscom Member Companies.
nasscom reserves the right to modify the terms of use of any service without any liability. nasscom reserves the right to take all measures necessary to prevent access to any service or termination of service if the terms of use are not complied with or are contravened or there is any violation of copyright, trademark or other proprietary right.
From time to time nasscom may supplement these terms of use with additional terms pertaining to specific content (additional terms). Such additional terms are hereby incorporated by reference into these Terms of Use.
Disclaimer
The Company information provided on the nasscom web site is as per data collected by companies. nasscom is not liable on the authenticity of such data.
nasscom has exercised due diligence in checking the correctness and authenticity of the information contained in the site, but nasscom or any of its affiliates or associates or employees shall not be in any way responsible for any loss or damage that may arise to any person from any inadvertent error in the information contained in this site. The information from or through this site is provided "as is" and all warranties express or implied of any kind, regarding any matter pertaining to any service or channel, including without limitation the implied warranties of merchantability, fitness for a particular purpose, and non-infringement are disclaimed. nasscom and its affiliates and associates shall not be liable, at any time, for any failure of performance, error, omission, interruption, deletion, defect, delay in operation or transmission, computer virus, communications line failure, theft or destruction or unauthorised access to, alteration of, or use of information contained on the site. No representations, warranties or guarantees whatsoever are made as to the accuracy, adequacy, reliability, completeness, suitability or applicability of the information to a particular situation.
nasscom or its affiliates or associates or its employees do not provide any judgments or warranty in respect of the authenticity or correctness of the content of other services or sites to which links are provided. A link to another service or site is not an endorsement of any products or services on such site or the site.
The content provided is for information purposes alone and does not substitute for specific advice whether investment, legal, taxation or otherwise. nasscom disclaims all liability for damages caused by use of content on the site.
All responsibility and liability for any damages caused by downloading of any data is disclaimed.
nasscom reserves the right to modify, suspend / cancel, or discontinue any or all sections, or service at any time without notice.
For any grievances under the Information Technology Act 2000, please get in touch with Grievance Officer, Mr. Anirban Mandal at data-query@nasscom.in.
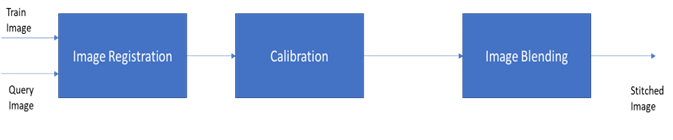
Before we dive in to Homography, let’s understand image stitching with the help of the block diagram in Figure 1.
Figure 1: Block diagram of an image stitching pipeline
The input to image stitching is a pair of images which are treated as Train image and Query image. These two images will undergo a Registration process, which involves identifying features from the individual images. This process of image registration uses popular techniques like SIFT, ORB etc., which have been embedded in OpenCV libraries. The extracted features are then fed to the next block, called the Calibration block, which will match the features between the two and come up with a model to estimate the translation/rotation between the two images. The Brute force method or K-means can be used to find closest matches and then fed to RANSAC (Random Sample Consensus) to learn and predict the model. This is where the Homography matrix comes in, dictating the match between the two images in terms of a parametric model. The third stage, Image Blending, is the process which involves transformation of one of the images by using homography matrix as warp perspective and then aligning with another image to blend as a single high-resolution image.
2. 2D transformations
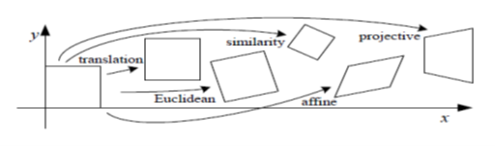
Let’s first understand the 2D transformation types that our images are generally subjected to.
Figure 2: Two dimensional transformations
2.1 Translation
2D translation can be picturized in matrix form as below:
As you can see, pixels at (x,y) locations are transformed to x’(x’ = x + tx ) and y’(y’= y + ty). From Figure 2, the rectangular box marked as ‘translation’ is shifted to new locations of (x’,y’). The above matrix representation is generic to represent any 2D-transformation. The 3rd row of the matrix is just for ensuring that we have a full rank of 3×3 matrix.
Now, let’s start adding more variabilities to the matrix to enable different transformations.
2.2 Rotation + Translation
Adding rotation to transformation of Equation (1), leads us to:
Where Ѳ is the amount of pixel rotation. Here in Equation (2), we can represent rotation matrix as:
R is an orthonormal rotation matrix, satisfying RRᵀ = I and ‖R‖=1.
(Where ᵀ represents the transpose operation)
The Translation vector is,
Equation (2) can be written in the linear system of equations as:
X’ = RX + T
where X’ = (x’, y’, 1)ᵀ , the new pixel coordinates
original pixel coordinates X = (x,y,1)ᵀ
Rotation, R as in equation (3a)
Translation T=(tx,ty,1)ᵀ)
2.3 Affine
The affine transformation can be represented as:
The affine is an indication that transformation is such that parallel lines remain parallel (which inherits the property of affine where a+b =1), hence yielding affine transformation. Consider a rectangular box positioned such that its origin is where (x,y) = (0,0). Observe that in Figure 2, the lines (edges) of the rectangular box, remained parallel post affine transformation.
A few important properties worth noting here are :
Origin of the box does not necessarily map to the origin after transformation.
Lines map to lines
Parallel lines remain parallel
Closed solution under composition. (Under this transformation, the transformation parameters can be found with unique parameters)
2.4 Projective
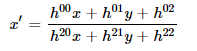
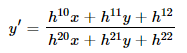
The projective transformation is also known as perspective transform or homography. This transformation operates on homogenous coordinates as:
Where H is 3×3 matrix embedding the 8 degrees of freedom.
Here the transformations are as follows:
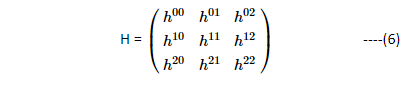
This generates a Homography matrix of the form:
Where h22 is normalized to a value of 1. As you can visualize here, the Homography transformations give 8 degrees of freedom from h00toh21. These can be correlated to Rotation (R), translation (t) (refer equation (3a and 3b)) and scaling (S).
Consider a rectangular box positioned at the origin where (x,y) = (0,0) as in Figure 2. After transformation, the box can be seen transformed to the extreme right.
A few important properties worth noting here are:
Origin of the box does not necessarily map to origin
Lines map to lines
Parallel lines do not necessarily remain parallel
Closed solution under composition
As you can see difference between Affine and homography / projective transformations is that parallel lines won’t remain parallel due to the additional 2 degrees of freedom that was brought in the form of h20 and h21, which indicates z direction of rotations.
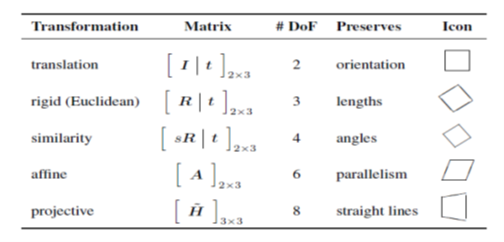
Table 1 summarizes the transformations:
Table 1: Different types of Transformations
These properties are useful when we are transforming one image to another image, where they have limited overlap between them, and the camera rotations or variations are embedded with 8 degrees of freedom. You can interpret Homography matrix as rotation along x,y,z direction and translation along x and y directions, keeping z-direction translation constant to 1, and adhering to the following:
3. Perspective projection
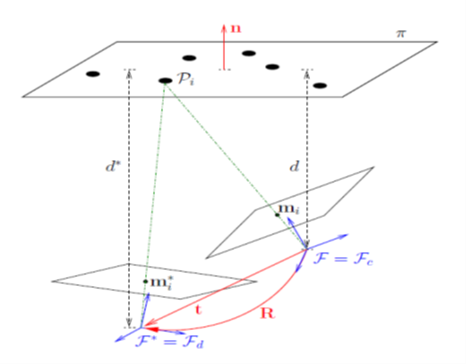
The following is required to create the parametric model of camera acquisition. In Figure 3., F represents the train image frame (current or reference frame) and F* represents the query image (desired frame, as we want to align to the desired one and stitch). The camera observes a planar object, consisting of a set of n 3D feature points, P, with cartesian coordinates
P =(X,Y,Z)
Figure 3: Desired and current frame planes and their relations geometrically
The d and d* represent respective distances from object plane to corresponding camera frame. The normal ‘n’ to the plane can be referred to the reference or current frame. The camera grabs an image of the object from both desired (query) and current (reference) settings, which implies 3D points on a plane so that they have the same depth from corresponding camera origin. The homogenous transformation matrix, converting 3D point coordinates from the desired frame to the current frame is
Here R and t are the rotation matrix and translation vector respectively. This allows Euclidian reconstruction from homography as follows:
Notice that n, normalized vector, is embedded, which ensures normality to object plane.
The above equation also indicates that there is possibility of extraction of individual components R, t and n.
3.1 Singular Value Decomposition (SVD):
The closed form solutions are obtained numerically with the help of SVD decomposition. {Ref. [1]}.
The eigen values and eigen vectors give a picture of which vector/value undergoes variations.
Hence,
Where Λ={λ₁ ,λ₂, λᴣ} , Eigen Values in descending order
V = [v₁,v₂,vᴣ] , corresponding Eigen Vectors
The eigen values can also be obtained directly from H using Equation (5) using
HX = λX’ , where λ are the eigen values.
The eigen values obtained using the above formula (H-λI) = 0 (Where I is an identity Matrix), may give complex eigen values, which are difficult to analyze. Hence SVD decomposition of Equation (9) nicely gives diagonal elements which are square of eigen values. The square root gives eigen values, which can be interpreted, and important properties can be derived as follows:
As in Equation (8), the Homography contains Rotation, translation, and normal vector. This defines translation vector, which is normalized as:
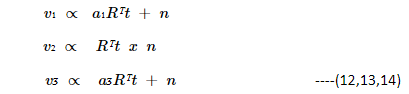
eigen vectors are,
The a1, a3 are scalars , defined as
4. Properties helpful to align images
Consider 3 cases of study to understand how to utilize Homography properties of Equations (10 to 15). We use the following two sets of images to showcase the insights obtainable from Homography. The Train and Query images of Figures 4 and 5 are fed into the block diagram of Figure 1 and we get Homography matrix as per the cases below:
Figure 4: Desired (query) and current (train) frames
Figure 5: Desired (query) and current (train) frames
Case 1 : Train Image and Query Image are the same
When the left image from Figure 4 is fed in to Figure 1 both as train and query image, we get:
eigen values, λ=(1,1,1)
This means Equations (10,11) translate to
||Rᵀt|| = 0
nRᵀt = 0
What this means is that there is no translation between the two images. This conclusion helps when we encounter the same images either repeated or very similar (close to 100% overlap), we can find translation vector and normal to conclude that images are the same and hence no alignment is required. Additionally, the confidence on this derivation can be improved with the following parameters:
Inlier ratio: Number of features matched between two images / Total number of features between two images = 10228/10228 = 100 %
The determinant of H = 1, indicates volume is 1.
Also, eigen values are 1, indicating the variations are uniform and if we draw ellipse of the eigen values axis, we get a circle indicating that in any direction you take, there is uniform variation, which in turn indicates no translation.
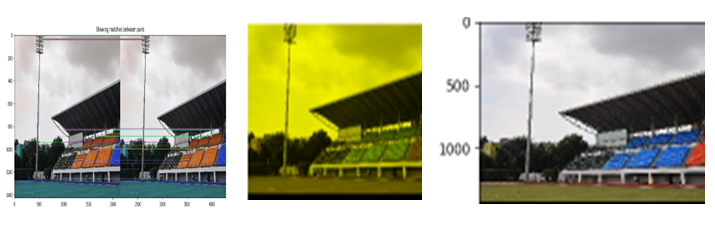
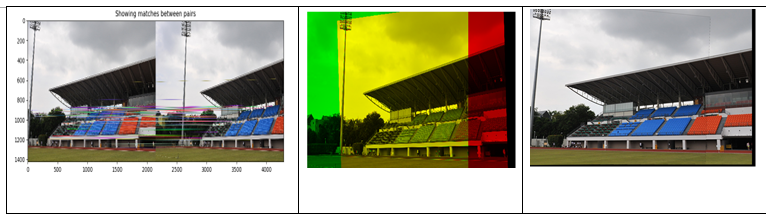
Figure 6: Left: few numbers of matches shown Middle: overlap between train and query images Right: stitched image (scaled to fit to page)
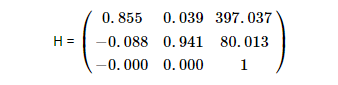
Case 2: Train and Query Images with some percentage of overlap, but images are different
The query and train images from Figure 4 are fed for stitching. Please note that train image has extra red seating of stadium and camera frame has moved closer to the flood lights, as compared to query image. There is some overlap seen in train image with respect to query image.
eigen values, λ=(405.0214,0.9499,0.00216)
This means translation is:
||Rᵀt||= 405.0214 – 0.00216 = 405.0192
nRᵀt = 405.0214*0.00216 – 1 = -0.125
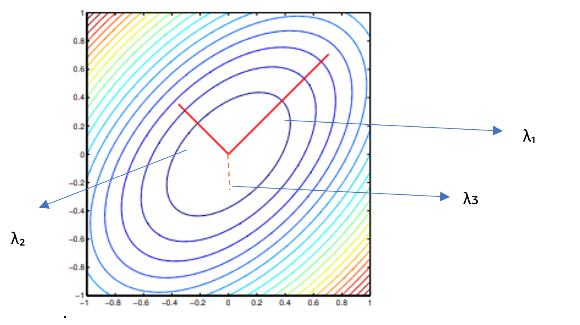
Let us understand the meaning of these values from the ellipse drawn in Figure 7.
Figure 7: Eigen values as part of axis of ellipse
As you see above, the ellipse major axis is driven by λ₁, and smaller axis by λ₂, with normalized z-plane by λᴣ. As the rotation and translation together are significant, the major axis of ellipse dictates the Rᵀt , which is a major contributor for change in two images, hence variance along this axis is high. The second eigen value is close to 1, gives an indication along this axis, the features are common and hence there is no variation along this axis between the two images. Last eigen value is along z-direction which is close to zero, indicating that in the z-direction there is no change, hence nRᵀt ~ 0.
Thus, ??>> ??=?>>?ᴣ —(16)
is an indication that we have got some amount of rotation and translation. This property is very useful to know how much variation exists between two images.
Figure 8: Left: few numbers of matches shown Middle: overlap between train and query images Right: stitched image (scaled to fit to page)
In the middle image, the yellow color shade indicates common features and green and red are respectively the new features from query and train images. As you can see the stitched image covers the extra red seating of the stadium.
The techniques described between Equations 10-15 are efficiently applied to get to the stitched image as above. Even while selecting RANSAC threshold, we utilized these properties to arrive at the threshold, to give optimal homography.
Another confidence builder to this is that we get inlier ratio of 4558/4990, which translates to 91.3% features are found to be common. The determinant of Homography is 0.833, which also indicates the matrix is nonsingular.
Another stitching established with help of above techniques for the images in Figure 5 are:
Figure 9: The stitched image of figure 5.
Case 3: Train and Query Images are different
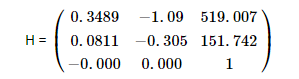
Let’s feed left part of Figure 4 and left part of Figure 5, which are entirely different to see its effect. Let’s first see the Homography:
Determinant of H = 1.929×10-6 (~0), which clearly indicates it is a singular matrix. Hence the volume covered by determinant is close to zero, indicating no common features between the two images. So, no alignment exists between the two images.
Inlier ratio = 26/1658 = 1.5%, these features which have appeared as common are due to noise or image registration imperfections.
5. Conclusion
The paper introduces how to use homography for detecting alignment of images and hence helping in image stitching. Stitching results are discussed using 2 image sets. The properties derived using eigen values are giving more value in terms of translation and rotation effects. These properties can be effectively applied in infrastructure analytics use cases (eg. Wind Turbine blade stitching) where many a time, imperfectly stabilized cameras are mounted on drones or crawler robots.
That the contents of third-party articles/blogs published here on the website, and the interpretation of all information in the article/blogs such as data, maps, numbers, opinions etc. displayed in the article/blogs and views or the opinions expressed within the content are solely of the author's; and do not reflect the opinions and beliefs of NASSCOM or its affiliates in any manner. NASSCOM does not take any liability w.r.t. content in any manner and will not be liable in any manner whatsoever for any kind of liability arising out of any act, error or omission. The contents of third-party article/blogs published, are provided solely as convenience; and the presence of these articles/blogs should not, under any circumstances, be considered as an endorsement of the contents by NASSCOM in any manner; and if you chose to access these articles/blogs , you do so at your own risk.
In today’s fast-paced digital world, businesses handle vast amounts of data. Much of this data is locked within documents, which can be PDFs, scanned images, or even handwritten notes. These documents often include invoices, bills, reports, medical…
The banking industry faces challenges: higher customer demands, complex fraud tactics, and large amounts of regulatory paperwork. Yet, a powerful solution is emerging. Recent studies show that 78% of financial institutions already use generative AI…
Tech companies have embraced an AI-first strategy, with partnerships taking centre stage in 2024. Notably, around 65% of these collaborations have ignited co-creation and AI innovation initiatives across cloud providers, software companies, hardware…
The insurance field is at a key turning point. Customer demand and competition are growing, and there is a strong push for greater efficiency. Recent data shows that 80% of insurance companies across the globe are now using AI in some form,…
In recent years, the cryptocurrency market has seen incredible growth and transformation. With countless investors and traders entering the market, the need for smart, efficient, and reliable trading strategies has never been greater. One of…
In an era where digital privacy is more critical than ever, Maskr AI is revolutionizing the way individuals and businesses protect their identities online. With increasing concerns over data breaches, cyber threats, and personal information leaks,…