The use of this site and the content contained therein is governed by the Terms of Use. When you use this site you acknowledge that you have read the Terms of Use and that you accept and will be bound by the terms hereof and such terms as may be modified from time to time.
All text, graphics, audio, design and other works on the site are the copyrighted works of nasscom unless otherwise indicated. All rights reserved.
Content on the site is for personal use only and may be downloaded provided the material is kept intact and there is no violation of the copyrights, trademarks, and other proprietary rights. Any alteration of the material or use of the material contained in the site for any other purpose is a violation of the copyright of nasscom and / or its affiliates or associates or of its third-party information providers. This material cannot be copied, reproduced, republished, uploaded, posted, transmitted or distributed in any way for non-personal use without obtaining the prior permission from nasscom.
The nasscom Members login is for the reference of only registered nasscom Member Companies.
nasscom reserves the right to modify the terms of use of any service without any liability. nasscom reserves the right to take all measures necessary to prevent access to any service or termination of service if the terms of use are not complied with or are contravened or there is any violation of copyright, trademark or other proprietary right.
From time to time nasscom may supplement these terms of use with additional terms pertaining to specific content (additional terms). Such additional terms are hereby incorporated by reference into these Terms of Use.
Disclaimer
The Company information provided on the nasscom web site is as per data collected by companies. nasscom is not liable on the authenticity of such data.
nasscom has exercised due diligence in checking the correctness and authenticity of the information contained in the site, but nasscom or any of its affiliates or associates or employees shall not be in any way responsible for any loss or damage that may arise to any person from any inadvertent error in the information contained in this site. The information from or through this site is provided "as is" and all warranties express or implied of any kind, regarding any matter pertaining to any service or channel, including without limitation the implied warranties of merchantability, fitness for a particular purpose, and non-infringement are disclaimed. nasscom and its affiliates and associates shall not be liable, at any time, for any failure of performance, error, omission, interruption, deletion, defect, delay in operation or transmission, computer virus, communications line failure, theft or destruction or unauthorised access to, alteration of, or use of information contained on the site. No representations, warranties or guarantees whatsoever are made as to the accuracy, adequacy, reliability, completeness, suitability or applicability of the information to a particular situation.
nasscom or its affiliates or associates or its employees do not provide any judgments or warranty in respect of the authenticity or correctness of the content of other services or sites to which links are provided. A link to another service or site is not an endorsement of any products or services on such site or the site.
The content provided is for information purposes alone and does not substitute for specific advice whether investment, legal, taxation or otherwise. nasscom disclaims all liability for damages caused by use of content on the site.
All responsibility and liability for any damages caused by downloading of any data is disclaimed.
nasscom reserves the right to modify, suspend / cancel, or discontinue any or all sections, or service at any time without notice.
For any grievances under the Information Technology Act 2000, please get in touch with Grievance Officer, Mr. Anirban Mandal at data-query@nasscom.in.
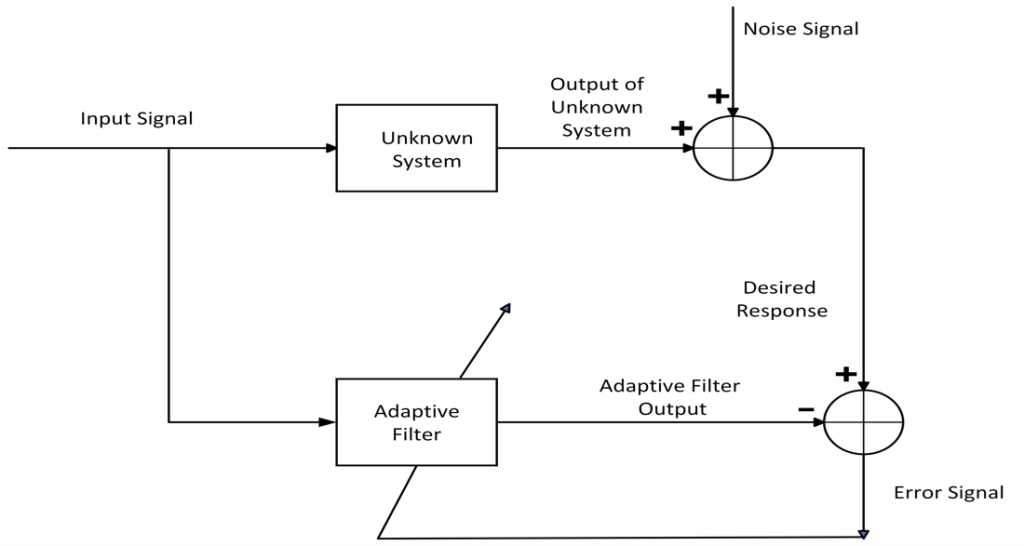
In some applications, the system or environment where processing is happening is unknown or time-dependant. In such applications, adaptive filters are required because they possess self-adjusting capabilities. An adaptive filter is mainly a digital filter that will adjust its filter parameters (coefficients) to converge the filter to the optimal solution of defined cost function using input data from the environment. The main target of these filters is to estimate the unknown entity of an input signal. They are used to reshape certain input signals in such a way that the filter output is a good estimate of the given desired signal.
The two steps involved in adaptive filtering process are: –
Filtering process,which produces an output signal in response to the given input signal using the updated filter coefficients, which later helps to adjust filter parameters in the adaptation process.
Adaptation process,to adjust the filter parameters according to the time varying environment. In this step, filter parameters (coefficients) are updated so that the cost function converges to its optimal solution by finding the best match between the desired signal and filter output.
Fig 1: Basic diagram of adaptive filter
The major applications of adaptive filters include noise cancellation, acoustic echo cancellation, bio-medical signal enhancement, equalizations of communication channels, active noise control, system identification, speech coding, multi-channel noise reduction and adaptive control systems. It works generally for the adaptation of signal-changing environments, and unknown or time-varying noise. For example: in echo cancellation, a dynamic mathematical model of channel that creates echo is generated by continuously monitoring the received signal. This model is used to create an estimate of echo path which is then subtracted from the signal to remove the effect of echo from desired signal.
2. Adaptive filter algorithms
Different kinds of adaptive filter algorithms includes
Least Mean Square Algorithm (LMS)
Variable Least Mean Square Algorithm (VLMS)
Normalized Least Mean Square Algorithm (NLMS)
Recursive Least Square Algorithm (RLS)
Affine Projection Algorithm (APA)
Kalman Algorithm
Among these algorithms, LMS, NLMS, VLMS, and RLS are generally considered as conventional adaptive filtering techniques.
The following outline the three basic steps for all algorithms:
Computing the output of the digital filter with a set of filter coefficients
Generation of an estimated error by comparing the filter output and desired signal
Adjusting filter coefficients based on the estimated error
Choosing the right kind of algorithm depends mainly on applications.
2.1.1 Least Mean Square Algorithm (LMS)
LMS Algorithm is a linear adaptive filtering algorithm and its a member of a stochastic gradient-based algorithm. An important feature of this algorithm is its robustness and low computational complexity. This is a fixed step-size algorithm and can be used in a wide range of applications such as channel equalization and echo cancellation, but it is not considered useful when a long echo duration is present as in case of teleconferencing. In teleconferencing, long impulse response or long memory is required to cope with the long duration of echo. LMS algorithm in time domain does not have a long memory to cope with the long-duration echo therefore it causes the problem of increased computational complexity. It mainly aims to reduce the mean square error between the signals. This algorithm uses a step size parameter to control immediate change in updating factor. As the value of step size decreases, the convergence speed to optimal values is slower and for large values, the filters will diverge and become unstable. So, we have to select the step size accordingly. It requires (2N+1) additions and (2N+1) multiplications, where N is length of adaptive filter.
Filter coefficients updating equation in LMS,
where,
μ – Step size, 0 < μ < 1
x(n) – Input signal
e(n) – Error signal
2.1.2 Normalized Least Mean Square Algorithm (NLMS)
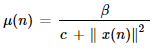
By using the normalized step size parameter in LMS algorithm, it becomes NLMS algorithm. Normalized step size improves the convergence behavior in NLMS algorithm. So, it becomes more powerful in applications like speech recognition. This algorithm is an equally simple but more robust variant of LMS algorithm, and also keeps a better balance between simplicity and performance than LMS algorithm. In this algorithm, the step size parameter is chosen based on the current input values. As human speech has more energy in low frequencies, this algorithm gives good echo cancellation for low frequencies and poor for high frequencies. Step size varies adaptively by following the changes in input signal level which prevents filter weights from diverging and makes the algorithm more stable and faster converging compared with a fixed step size algorithm. NLMS algorithm requires (3N+1) multiplications and 1 division.
Weight vector updating equation becomes,
Step size for computing the weight updating factor is,
c – Safety factor is a positive constant, which prevents the division by a very small number of the data norm
2.1.3 Variable Step Size – Least Mean Square Algorithm (VSS – LMS)
VSS algorithm uses varying step size parameter. Large step size is used for faster convergence and small step size for reducing misalignment.
At the beginning of adaptation process, filter weights are far from optimum values and step size should be large to converge rapidly but when it is approaching steady state solution, step size should decrease in order to reduce the mean square error.
Filter coefficients can be updated using the following equation,
Where,
μi(n) – Step size, a varying parameter
VSS algorithm with normalization has (4N+1) multiplications and 1 division.
2.1.4 Recursive Least Square
In this method, the least squares estimate of filter weights is computed recursively in order to minimize the weighted least square cost function related to input signals. In LMS-based algorithms, MSE is minimized. Main advantages of RLS over other methods are its faster convergence, and minimum error at convergence but more complexity due to more complicated mathematical operations. It requires more computational resources than LMS algorithms. The instability of RLS algorithm makes it unsuitable for equalization purposes. RLS is more efficient to use on echo cancellation, channel equalization, and speech enhancement radar applications. However, complexity of RLS algorithm prevents its usage. This algorithm requires (N2) Multiplications.
Weight updating factor is updated using below equation,
where,
K(n) – Gain vector
2.1.5 Affine Projection Algorithm (APA)
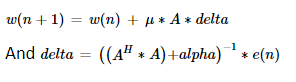
Affine projection LMS algorithm is also called as generalized NLMS algorithm. Compared to NLMS, APA not only considers errors at the current time but also takes hypothetical errors resulting from old data vectors filtered by the adaptive filter with current coefficient settings. It is a signal reuse algorithm and it has a good convergence rate compared to other traditional adaptive filtering algorithms. Step size parameter and projection length are the two important parameters that affect the performance of this algorithm. Increasing the projection order not only speeds up the convergence but also increases steady-state misalignment and computational complexity. If projection order M=1, then it behaves like NLMS algorithm. For speech applications projection order M=2 provides faster convergence. Suggested values of projection order (M) is between 2 to 5. The complexity of this algorithm is 2MN where N is length of adaptive filter.
Weight updation equation is as follows,
Where,
μ - Step size
A – Projection matrix
delta – Inverse of the normalization matrix
2.1.6 Kalman Algorithm
Kalman filters are computationally efficient, inherently robust, more accurate, and do not require any additional regularization or control mechanisms compared to other adaptive filtering techniques. This is also a recursive least squares error method for estimating distorted signals transmitted through channels or observed in noise. Kalman Filter is a prediction-correction model used in linear, time-variant, or time-invariant systems. Prediction model involves actual system and process noise. The updated model involves updating the predicated or estimated value with the observation noise. Kalman gain is calculated based on RLS algorithm in order to reach optimal value within less amount of time. Computational complexity of Kalman filter is N3.
Weight updating equation in Kalman algorithm is,
Where,
K - Kalman gain
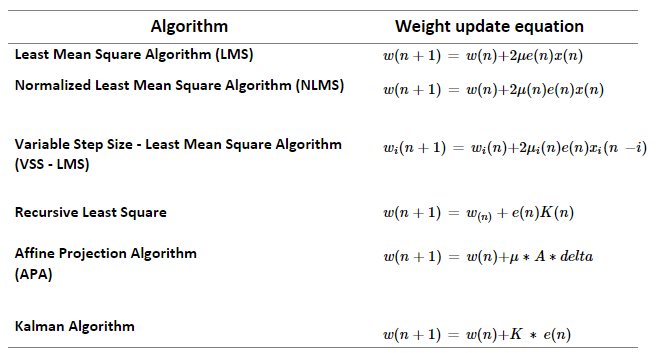
Weight update equation for different adaptive filters is shown in Table 1.
Table 1: Weight update equation
3. Comparison
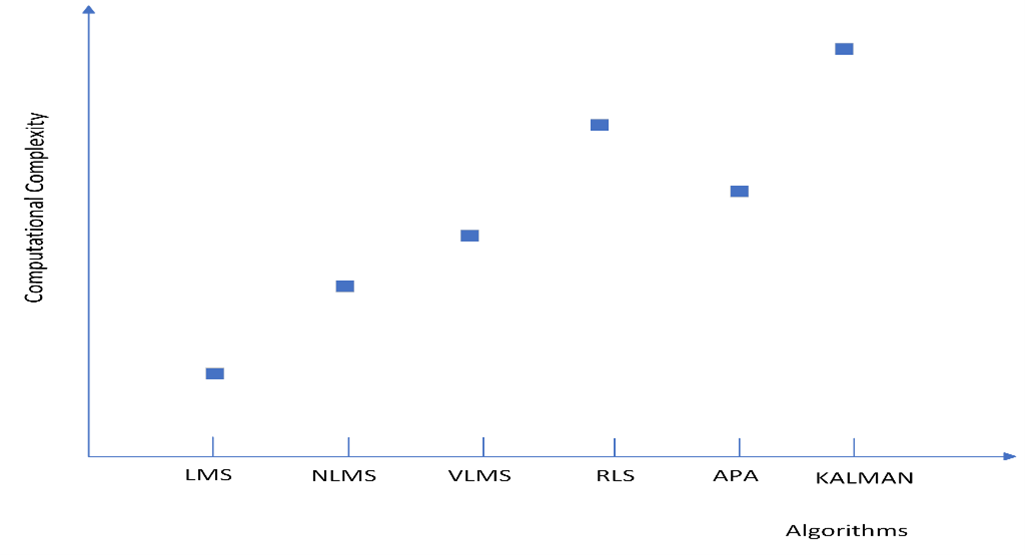
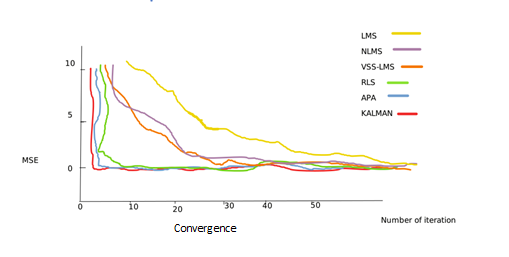
The graphs below show the comparison of each algorithm in terms of its computational complexity and convergence rate. As per computational complexity, it is found that Kalman has more complexity than other algorithms.
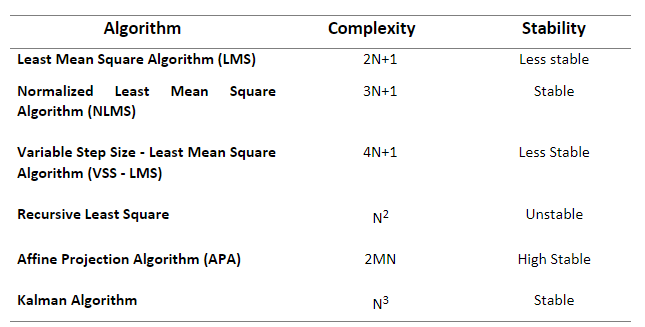
Fig 2: Comparisons of complexities for different algorithms Fig 3: Comparison of convergence rates for adaptive filters Table 2: Complexity and Stability Comparison
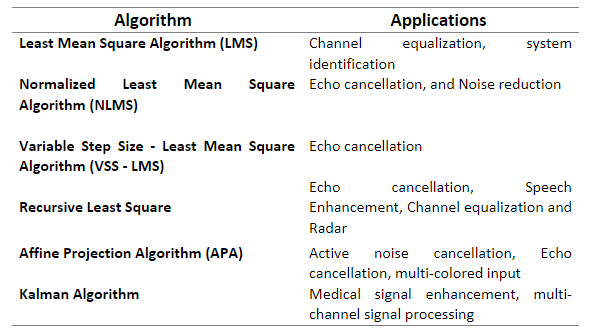
Choosing the right filter algorithm depends on many factors, including convergence performance, computational complexity, filter stability in the environment and applications. The table below shows the applications of different adaptive filters.
Table 3: Applications comparison
4. Conclusion
Performance of each algorithm varies depending on its applications, environment, and various other factors described before. LMS algorithms are best for channel equalization while RLS ones prove most efficient for echo cancellation. However, complexity of RLS algorithm prevents its usage, and thereby we can use NLMS/VSS-NLMS for echo cancellation depending upon the application priority. In the case of colored input applications, APA converges at a very fast rate when compared to other algorithms due to projection order. Kalman provides better results in signal enhancement applications. But it is more complex compared to all other algorithms.
That the contents of third-party articles/blogs published here on the website, and the interpretation of all information in the article/blogs such as data, maps, numbers, opinions etc. displayed in the article/blogs and views or the opinions expressed within the content are solely of the author's; and do not reflect the opinions and beliefs of NASSCOM or its affiliates in any manner. NASSCOM does not take any liability w.r.t. content in any manner and will not be liable in any manner whatsoever for any kind of liability arising out of any act, error or omission. The contents of third-party article/blogs published, are provided solely as convenience; and the presence of these articles/blogs should not, under any circumstances, be considered as an endorsement of the contents by NASSCOM in any manner; and if you chose to access these articles/blogs , you do so at your own risk.
Like every industry, the software development landscape also sits on the goldmine of data. Harnessing the value of the growing data helps software development companies make data-driven decisions, enhance software development processes, and take…
The demand for skilled AWS Cloud Engineers is skyrocketing, and the future looks bright for those in this field. Here, we'll explore the top 7 future scopes for AWS Cloud Engineers, ensuring that every aspiring or established engineer understands…
For startups aiming to move quickly and establish market leadership, traditional growth models often fall short. Instead, many are embracing hyper growth strategies for digital businesses—approaches built to support rapid scaling while maintaining…
Authored by: Srinand Ramachandra / Director – Sales, Xoriant
In 2024, global supply chain disruptions surged by nearly 40%, underscoring just how vulnerable modern supply networks remain. From geopolitical instability—such as missile…
Abstract:
Achieving an Ingress Protection (IP) rating is a critical requirement for electronic devices designed to operate in challenging environments. This whitepaper outlines the different methodologies for designing and developing…
Artificial Intelligence (AI) is no longer a concept of the future; it's already transforming the way we work and live. In journalism, AI is assisting reporters, editors, and media outlets to work faster, smarter, and more efficiently.…