The use of this site and the content contained therein is governed by the Terms of Use. When you use this site you acknowledge that you have read the Terms of Use and that you accept and will be bound by the terms hereof and such terms as may be modified from time to time.
All text, graphics, audio, design and other works on the site are the copyrighted works of nasscom unless otherwise indicated. All rights reserved.
Content on the site is for personal use only and may be downloaded provided the material is kept intact and there is no violation of the copyrights, trademarks, and other proprietary rights. Any alteration of the material or use of the material contained in the site for any other purpose is a violation of the copyright of nasscom and / or its affiliates or associates or of its third-party information providers. This material cannot be copied, reproduced, republished, uploaded, posted, transmitted or distributed in any way for non-personal use without obtaining the prior permission from nasscom.
The nasscom Members login is for the reference of only registered nasscom Member Companies.
nasscom reserves the right to modify the terms of use of any service without any liability. nasscom reserves the right to take all measures necessary to prevent access to any service or termination of service if the terms of use are not complied with or are contravened or there is any violation of copyright, trademark or other proprietary right.
From time to time nasscom may supplement these terms of use with additional terms pertaining to specific content (additional terms). Such additional terms are hereby incorporated by reference into these Terms of Use.
Disclaimer
The Company information provided on the nasscom web site is as per data collected by companies. nasscom is not liable on the authenticity of such data.
nasscom has exercised due diligence in checking the correctness and authenticity of the information contained in the site, but nasscom or any of its affiliates or associates or employees shall not be in any way responsible for any loss or damage that may arise to any person from any inadvertent error in the information contained in this site. The information from or through this site is provided "as is" and all warranties express or implied of any kind, regarding any matter pertaining to any service or channel, including without limitation the implied warranties of merchantability, fitness for a particular purpose, and non-infringement are disclaimed. nasscom and its affiliates and associates shall not be liable, at any time, for any failure of performance, error, omission, interruption, deletion, defect, delay in operation or transmission, computer virus, communications line failure, theft or destruction or unauthorised access to, alteration of, or use of information contained on the site. No representations, warranties or guarantees whatsoever are made as to the accuracy, adequacy, reliability, completeness, suitability or applicability of the information to a particular situation.
nasscom or its affiliates or associates or its employees do not provide any judgments or warranty in respect of the authenticity or correctness of the content of other services or sites to which links are provided. A link to another service or site is not an endorsement of any products or services on such site or the site.
The content provided is for information purposes alone and does not substitute for specific advice whether investment, legal, taxation or otherwise. nasscom disclaims all liability for damages caused by use of content on the site.
All responsibility and liability for any damages caused by downloading of any data is disclaimed.
nasscom reserves the right to modify, suspend / cancel, or discontinue any or all sections, or service at any time without notice.
For any grievances under the Information Technology Act 2000, please get in touch with Grievance Officer, Mr. Anirban Mandal at data-query@nasscom.in.
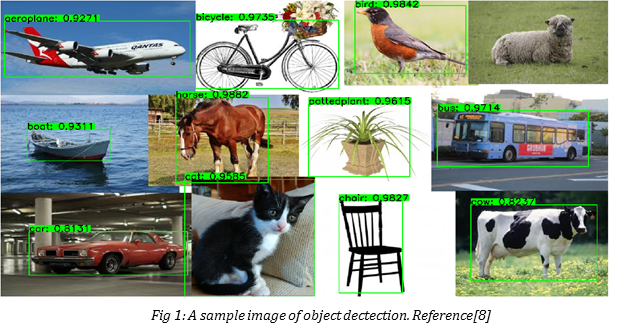
Object detection is a task in computer vision, which requires the algorithm to predict a bounding box with a class label for each Region of Interest (ROI) in an image. Anchor-based detectors have ruled this space for a long time. Recently, anchor-free detectors have started to overtake anchor-based detectors due to their lower computational complexity and efficient detections. NanoDet has generated interest in the AI community as it is a fast and lightweight anchor-free object detection model.
This blog aims to introduce NanoDet – a new model which comes with less memory footprint along with better detection performance compared to anchor-based models.
2.0 Anchor based models vs Anchor–free models
2.1 Anchor based models
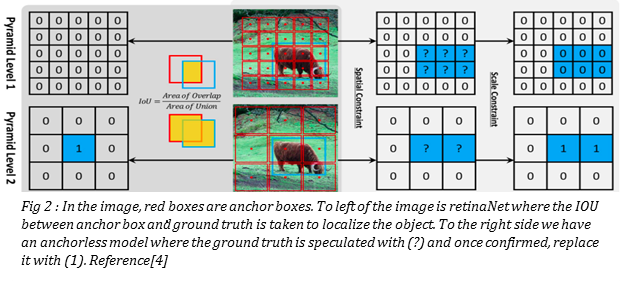
In an anchor-based model, predefined anchor boxes of various sizes are used to calculate the location of the object in an image. In anchor-based detectors, the bounding box locations are predicted using an additional offsets regression, which can be thought of as pre-defined sliding windows or proposals that are categorized as positive or negative classes.
2.2 Anchor–free models
To identify and locate the objects in an image, anchor-free models use a per-pixel classification, which is comparable to segmentation. As a result, computations are simplified and the necessity for anchor boxes as a hyperparameter is eliminated.
Conventionally, anchor-based models such as single-shot detector SSD[1], You Only Look Once YOLO[2] and region-based convolutional neural network R-CNN[3] were popular for object detection. Although anchor-based models have performed adequately well with respect to detections in real-world applications such as person detection, crowd counting, licence plate detection and recognition, there were several drawbacks.
Some of the drawbacks of anchor-based detectors are [4]:
The prediction is dependent on size, number and aspect ratios of anchor boxes. With predefined anchor boxes, detectors encounter difficulties to deal with objects of large shape variations, particularly for small objects
Large number of anchor boxes are required to predict the objects. Most of these anchor boxes return negative values resulting in an imbalance between positive & negative samples
Complex computation to calculate the Intersection Over Union (IOU) with ground truth to classify each anchor box as positive or negative
Anchor-Free Object Detectorsaddress the above drawbacks. In an anchor-free model, every pixel in the feature map is predicted within an object box, similar to segmentation.
A few prominent advantages of anchor-free object detections are [5]:
Detection framework works like classical fully convolutional segmentation networks
There is no dependence on the size of anchor boxes for detection
Detection becomes anchor free which lowers the computational complexity and design hyper parameters.
Since anchor-free models tend to be faster with better results and can be deployed on low-cost edge devices with lesser memory footprint, we chose NanoDet, an anchor-free model for detecting numbers from a number plate. Before looking into an example let’s briefly review NanoDet.
3.0 NanoDet
NanoDet [6]. is a lightweight, superfast, real-time object detection model that comes with the following features.
Model file size 980KB(INT8) or 1.8MB(FP16).
Speed: 97fps (10.23ms) on mobile ARM CPU.
High accuracy up to 34.3 mAP@0.5:0.95 on COCO-dataset and still real-time on CPU.
Easier to train and has much lower GPU memory cost than other models. The model can be trained with a batch-size of 80 on GTX1060-6GB
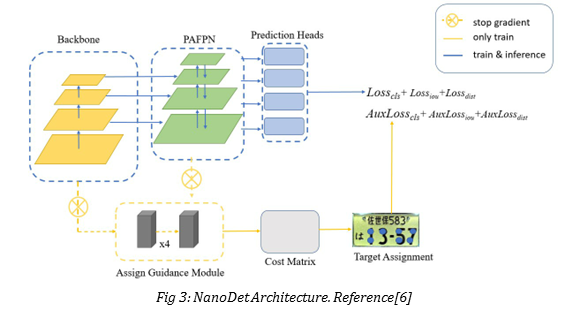
3.1 Architecture of NanoDet
Backbone: NanoDet uses ShufflenetV2 [7] which is a very robust & cost-effective structure for mobile devices as a backbone.
Neck: NanoDet uses Pyramid Attention Network (PAN) for extracting feature maps but all the convolutions except for 1×1 convolutions were removed for a lighter weight model.
Head: NanoDet uses depth wise convolution at the head to make it light weight. The border regression & classification is calculated using the same convolutions and later split into two parts to reduce calculations.
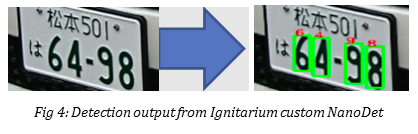
4.0 Automatic Number Plate Recognition (ANPR)
The objective of this experiment is to detect only the large font numbers in a number plate in real-time, which can be even used for digit recognition, given the training data has seen such labeled data during training.
4.1 Dataset
A dataset with more than 2000 original number plate images were collected from various sources which consist of license plates pertaining to different colour backgrounds from various vehicles. To augment original data, synthetic data has been used to enhance the count of training image samples to attain the expected result.
The dataset was labeled using Labeling and corresponding .XML of the image annotation file was created. The list of classes includes digits from 0 to 9 as the class labels.
4.2 Experiments
The dataset was divided into training and validation with the ratio 80% – 20% respectively. The model was trained for 1000 epochs using Pytorch and later converted to tflite. The size of the model was 1.9 MB in float16 that got reduced to 970 KB with int8 conversion. This memory footprint helps to get deployed on a low-cost edge device such as R-pi where memory is a concern.
Several models were trained and tested using the same dataset before NanoDet was used. On the Ignitarium custom dataset, models like YOLOv4-Tiny had a mAP of 20.8 with a size of 3.2MB, and YOLOX-Nano, an anchor-free model, had a mAP of 33.6. As the preliminary results were satisfactory with a mAP of 42, to further reduce the size, layer customization was done on the model. The customized NanoDet model was retrained for 2000 epochs with the same amount of data. The results of customized NanoDet model (38.9 mAP) were comparable to the original model. The customized model after converting to int8 had a size of ~753 KB without much drop in performance.
The results obtained from NanoDet were comparable with the results from other detectors like YOLOX-Nano, YOLOv4-Tiny. The custom NanoDet model had a mAP of 38.9 with a size of 753KB. The test results were compared on the same bench marking data created in-house to use across all the models for testing. NanoDet outperformed in terms of detection accuracy and memory footprint on the Ignitarium custom test data.
5.0 Conclusion
An anchor-free & proposal-free single-stage detector called NanoDet is used to detect numbers in a number plate. This model is lightweight with good performance. It is comparable with popular anchor-based models like YOLO & SSD. The model completely avoids all computation and hyper-parameters related to anchor boxes and solves the object detection in a per-pixel prediction fashion. NanoDet can be used for various other detection applications in the future as well, which comes as a strong alternative to anchored models and has diverse applications.
For an alternative AI-based approach towards ANPR, please refer Ignitarium’s blog accessible here.
References
“SSD: Single Shot MultiBox, Detector”, Wei Liu, Dragomir Anguelov, et al.2016.
“You Only Look Once:Unified, Real-Time Object Detection”, Joseph Redmon∗, Santosh Divvala∗†, Ross Girshick, Ali Farhadi University of Washington∗, Allen Institute for AI†, Facebook AI Research.
“Rich feature hierarchies for accurate object detection and semantic segmentation Tech report (v5)” Ross Girshick Jeff Donahue Trevor Darrell Jitendra Malik
Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection, Shifeng Zhang, et al.2022
FCOS: Fully Convolutional One-Stage Object Detection, Zhi Tian, et al.2019
That the contents of third-party articles/blogs published here on the website, and the interpretation of all information in the article/blogs such as data, maps, numbers, opinions etc. displayed in the article/blogs and views or the opinions expressed within the content are solely of the author's; and do not reflect the opinions and beliefs of NASSCOM or its affiliates in any manner. NASSCOM does not take any liability w.r.t. content in any manner and will not be liable in any manner whatsoever for any kind of liability arising out of any act, error or omission. The contents of third-party article/blogs published, are provided solely as convenience; and the presence of these articles/blogs should not, under any circumstances, be considered as an endorsement of the contents by NASSCOM in any manner; and if you chose to access these articles/blogs , you do so at your own risk.
Software-defined vehicles (SDVs) are already creating ripples in the automotive industry, especially among passenger vehicles. But what about the commercial vehicle (CV) sector? For an industry fueled by tight margins and focused on total cost…
Enhancing Public Safety with Smart Security and Surveillance Solutions
In an era where security and safety are paramount concerns for cities and communities, smart security and surveillance solutions are revolutionizing the way we protect our…
At a time when ushering in modernization using cutting-edge technologies is a key imperative across organizations, the railways system in India is not far behind. Technologies like artificial intelligence (AI), cloud computing, radio frequency…
In an era where security and safety are paramount concerns for cities and communities, smart security and surveillance solutions are revolutionizing the way we protect our public spaces. From intelligent video analytics to facial recognition…
Off-road vehicles increasingly feature Advanced Driver Assistance Systems (ADAS). Several ADAS technologies, often adopted from conventional road cars, are making their way into off-road vehicles to improve their performance, safety, and efficiency…
While the civil aviation industry in the United States continues to prosper, it is not immune to its challenges. U.S. airlines have faced substantial repercussions from significant historical events commencing with the onset of the COVID-19 pandemic…